Balancing Robot From Scratch Circuit Diagram Make Kp, Ki, and Kd equal to zero. Adjust Kp. Too little Kp will make the robot fall over, because there's not enough correction. Too much Kp will make the robot go back and forth wildly. A good enough Kp will make the robot go slightly back and forth (or oscillate a little). Once the Kp is set, adjust Kd. 5)The IMU mpu6050 is not perfectly position, when start the robot, observe and adjust so that when the robot in straight up balance position neither motor turns or only turn slightly. To adjust: physically tilt the IMU mpu6050 until reach the desire position, fit with tape or glue gun or other mean to fix the IMU mpu6050.

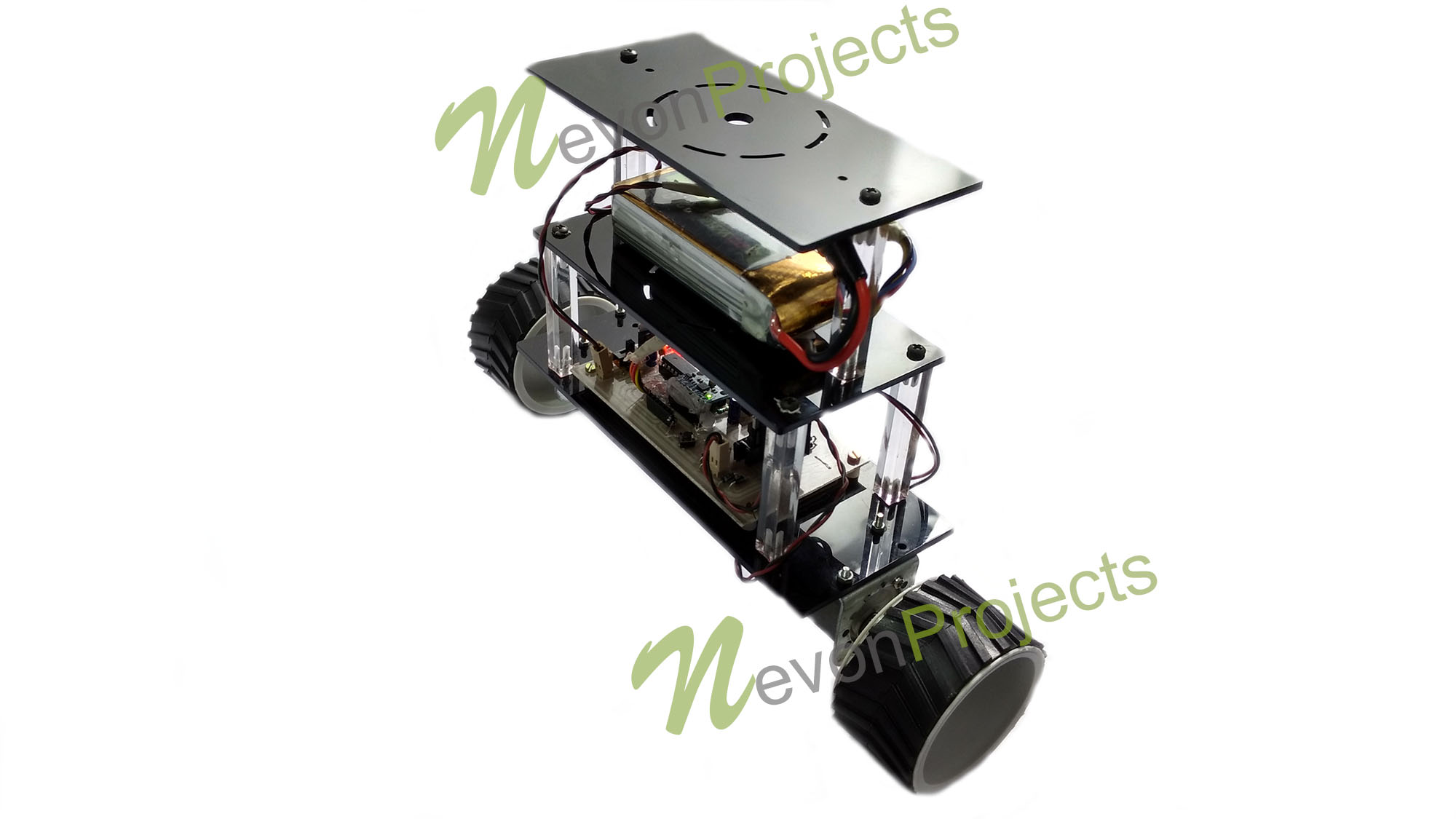
This is a relatively simple, visually effective balancing robot project that only requires four components to make. Detailed video, instructions, schematic, and code at: Arduino two weel self Balancing Robot
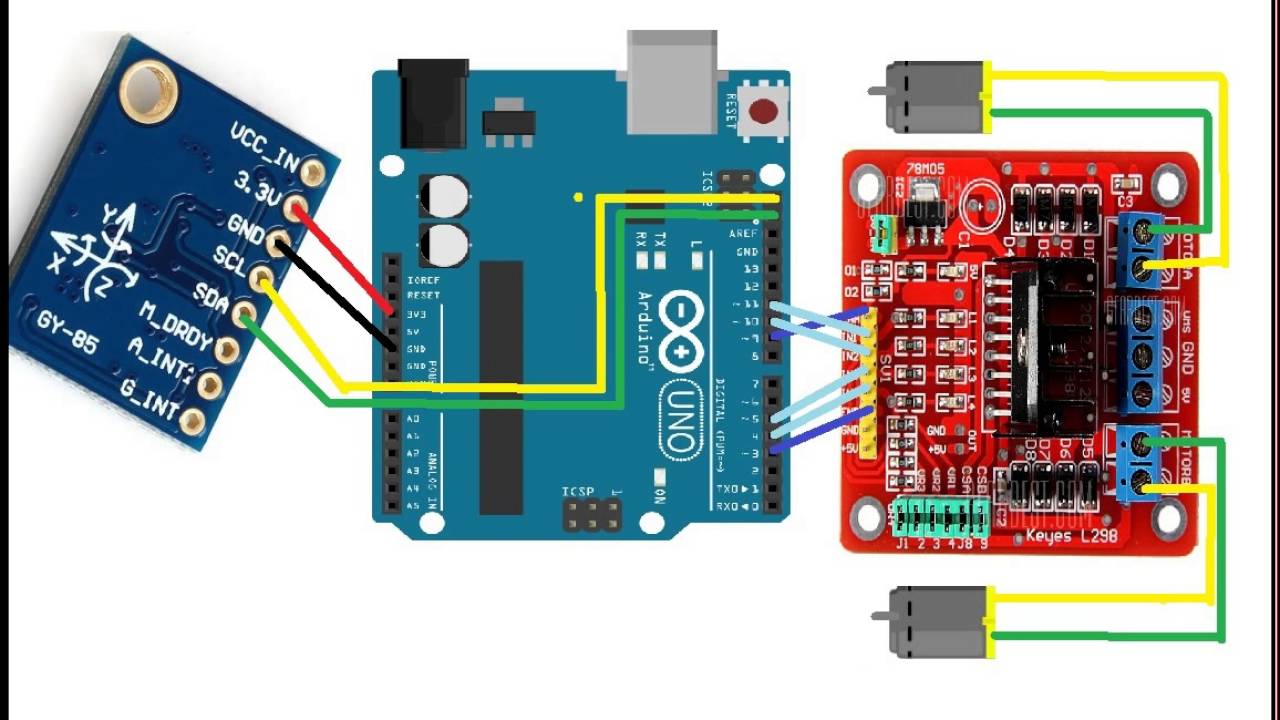
Arduino Self Balancing Robot Using MPU6050 Accelerometer Circuit Diagram
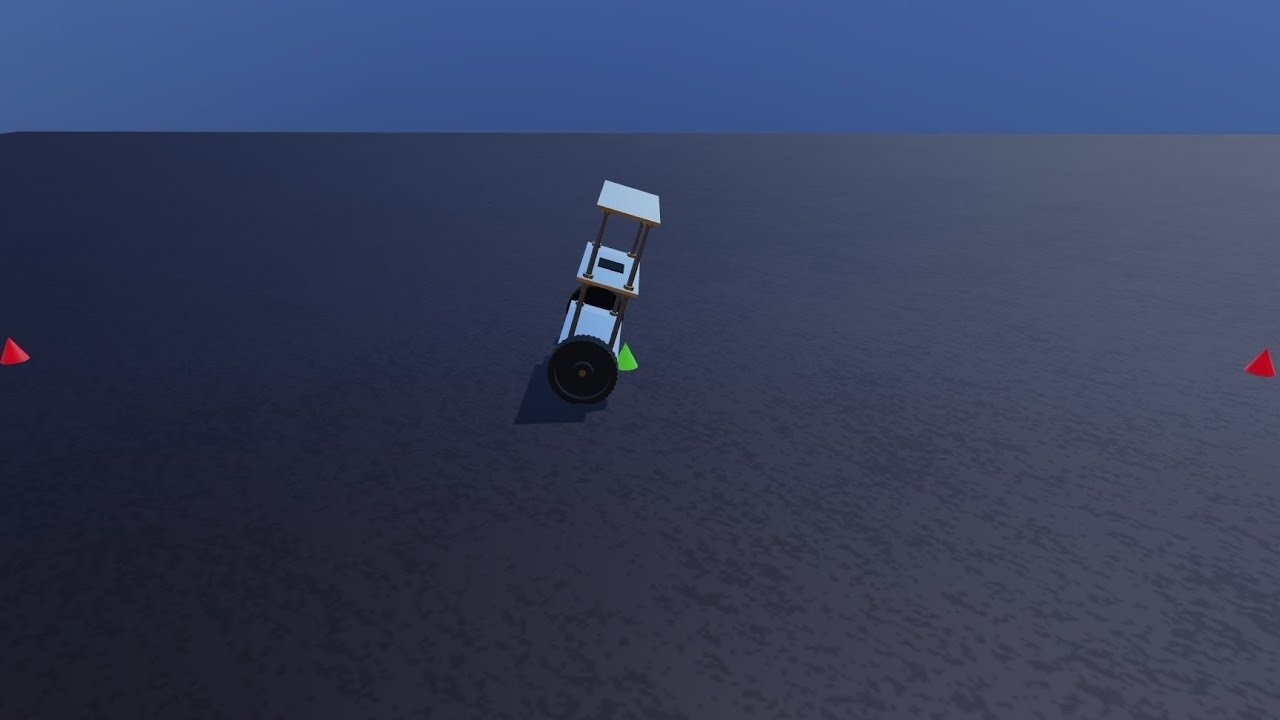
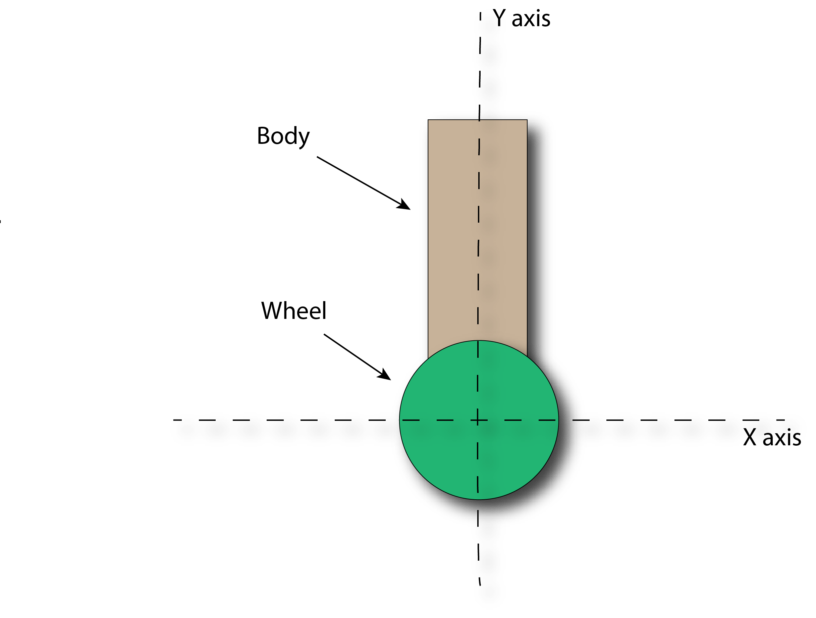
Self Balancing Robot is a two-wheeler automated robot that can balance itself from falling to the ground. This is similar to other typical two-wheeled self balancing robots, such as the Segway. Its function is to maintain balance using the motor's axis movement of the wheels and body. Types of self-balancing robots. There are several types of Self-balancing robots use a "closed-loop feedback control" system; this means that real-time data from motion sensors are used to control the motors and quickly compensate for any tilting motion in order to keep the robot upright. Similar self-balancing feedback control systems can be seen in many other applications. (AUTOMATIC); pid
As the name suggests, the self-balancing robot is an automated vehicle that balances itself without any outside help or support. This project is a rather complex one as it involves using PID Control and involuted programming. Self-balancing robots are unique among all others, just because of their
DIY Self Balancing Robot using Arduino Circuit Diagram
Now we put some value for Kp and perform testing. Too little Kp will make robot fall over. Too much Kp will make the robot go back and forth wildly. A good Kp will make the robot go slightly back and forth. Next we need to set Kd. A gooD Kd value will lessen the oscilation until the robot is almost steady, and will keep the robot standing. After being inspired by RYNO motors and other self balancing scooters from Segway, I always wanted to build something my own Arduino Segway Robot.Thinking for while, I decided to build a Self Balancing Robot using Arduino.This way I would be able to grasp the underlying concept behind all these scooters and also learn how PID algorithm works.. Once I started building, I realized that this bot