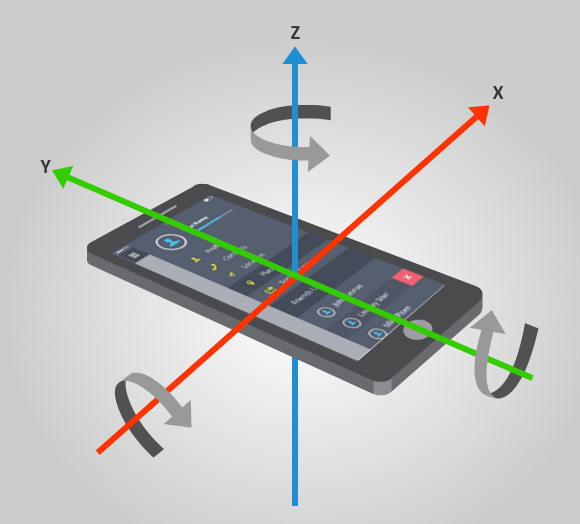
A Digitalized Gyroscope System Based on a Modified Adaptive Control Method Circuit Diagram 3-Axis Gyroscope. MPU6050 has a 3-axis gyroscope that uses Micro Electro Mechanical System technology to measure rotational velocity. The gyroscope consists of a tiny mass that moves back and forth in response to rotational motion. As the mass moves, it causes a change in capacitance, which is detected by the MEMS sensors. The MPU-6050 IMU (Inertial Measurement Unit) is a 3-axis accelerometer and 3-axis gyroscope sensor. The accelerometer measures the gravitational acceleration, and the gyroscope measures the rotational velocity. Additionally, this module also measures temperature. This sensor is ideal for determining the orientation of a moving object.
Gyroscope sensors are essential components in modern technology, known for their ability to measure and maintain orientation. Found in devices ranging from smartphones to aerospace systems, these sensors allow precise motion detection and stabilization. They are particularly useful in applications where tracking orientation, rotation, or Three Axis gyroscope sensors are very useful in making like flight controllers, ship/boat controllers, direction prediction and controlling the Microcontroller accordingly. In today's tutorial, we will discuss about MPU6050 gyro sensor and make a small project to know the functionality. Which can show Pitch, yaw and roll readings on display. So, if we fuse, or combine the accelerometer and gyroscope data we can get very accurate information about the sensor orientation. The MPU6050 IMU is also called six-axis motion tracking device or 6 DoF (six Degrees of Freedom) device, because of its 6 outputs, or the 3 accelerometer outputs and the 3 gyroscope outputs.
Arduino and MPU6050 Accelerometer and Gyroscope Tutorial Circuit Diagram
Using the ESP32 & BMI160 Accelerometer and Gyroscope Module, we can develop a C++ Code to read the Acceleration values. We have converted the raw readings into acceleration using the mathematical equations. The following code initializes the BMI160 sensor using I2C communication. It sets the accelerometer to normal mode. Gyroscopes and accelerometers can stabilize objects, while magnetometers can make digital compasses. GPS sensors can track an object's location, and ultrasonic and IR sensors can detect objects for landing and obstacle avoidance systems. Explore the tutorials below to learn how to use these powerful sensors! Senor is ready to read the values and to get the reading we create sensor event sensors_event_t a, g, temp; and store reading in them using mpu.getEvent(&a, &g, &temp). start printing stored values using a.acceleration.x/y/z for acceleration , g.gyro.x/y/z for gyroscope and temp.temperature respectively.
Using Gyroscopes to Enhance Motion Detection Adam Meyer Follow this and additional works at: https://scholar.valpo.edu/stja Part of the Engineering Commons This Trade Journal Article is brought to you for free and open access by the College of Engineering at ValpoScholar. Motion tracking sensors are used in applications like robotics, gesture recognition, vehicle stabilization, position control in drones/quadcopters, pointing devices, game controllers, and fitness tracking devices. One of the popular motion tracking sensors is MPU6050. It is a six-axis MEMS motion tracking sensor that includes a MEMS accelerometer and a MEMS gyroscope. The sensor also has…
